Tekoälypohjainen näkökulma täsmäviljelyyn
NVIDIA Jetson tekoälytietokone ja Stereolabs ZED 2i stereokamera maataloudessa

Mikä on NVIDIA Jetson?
NVIDIA Jetson on kehitysalusta, joka yhdistää tehokkaan laskentakapasiteetin ja matalan virrankulutuksen. Jetson-moduulit on suunniteltu erityisesti reunalaskentaan (edge computing), jossa tekoälymallit suoritetaan suoraan laitteella ilman pilvipalveluiden viivettä.
Jetsonin ytimessä on NVIDIA:n kehittämä GPU-arkkitehtuuri, joka mahdollistaa monimutkaiset koneoppimis- ja tietokonenäkötehtävät reaaliajassa. Tämä tekee siitä ihanteellisen alustan robotiikalle, autonomisille ajoneuvoille, valvontajärjestelmille ja muille AI-sovelluksille, joissa tarvitaan tehokasta laskentaa kompaktissa muodossa.
Stereokamera
Stereokamerat ovat kehittyneitä 3D-kameroita, jotka hyödyntävät kahta linssiä syvyystiedon tuottamiseen. Ne mahdollistavat ympäristön hahmottamisen samalla tavalla kuin ihmisen silmät, laskemalla tarkasti etäisyydet kuvassa näkyviin kohteisiin ja luomalla syvyyskartan.
Stereolabsin kamerat toimivat erityisen hyvin NVIDIA Jetson -alustojen kanssa, mahdollistaen reunalaskennan (edge computing) ja reaaliaikaisen analytiikan ilman ulkoisia palvelimia.
Esittelen myöhemmissä blogiteksteissä käyttämäni Stereolabs ZED 2i stereokameran ja Luxonis Oak D2 stereokameran. Molemmat ovat stereokameroita, mutta eroavat toisistaan rakenteeltaan ja ohjelmistoltaan.
Mitä on reunalaskenta?
Reunalaskennassa tieto käsitellään heti siellä, missä se kerätään ja missä sitä tarvitaan – esimerkiksi pellolla toimivassa traktorissa, tai asennettuna paikalleen suorittamassa reaaliaikaista havainnointia ja data-analyysiä mihin voidaan reagoida välittömästi. Mieluiten automaattisesti.
Maataloudessa reunalaskentaa voidaan käyttää muun muassa;
- Autonomiset maatalouskoneet ja robotiikka.
- Kasvianalyysi ja sadon seuranta
- Rikkakasvien tunnistus, tyhjien paikkojen tunnistus
- Karjan valvonta ja laiduntamisen optimointi
- Objektin tunnistus, ihminen, este, eläin. Objektien lajittelu ryhmiin.
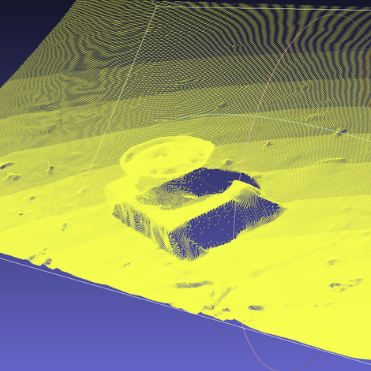
- Maaston mallinnus




Käytännön kokoonpanoesimerkki
Tämän projektin laitteisto on teollisuuskäyttöön suunniteltu Jetson Orin NX 16GB - pohjainen Seeed Studio ReComputer J4012 sulautettu tietokone ja Stereolabs ZED 2i stereokamera.
Miksi tähän kokoonpanoon valikoitui teollisuusmalli tavanomaisen koteloinnin sijaan;
- Kestävä ja tiivis kotelo, tavanomainen tuuletin on korvattu passiivisella jäähdytyksellä.
- Valmiiksi monipuoliset kotelon ulkopuoliset liitännät, etenkin GPIO liitin.
- VESA kiinnitys
Traktorin ohjaamoon on jo valmiiksi haastavaa asentaa uusia koteloita, mutta VESA-kiinnitys helpottaa asennusta jonkin verran. GPIO-liitin puolestaan mahdollistaa sen, että Jetson voi ohjata ulkoisia laitteita, kuten lineaarimoottoria tai signaalivaloja. Lisäksi se voi automaattisesti käynnistää, sammuttaa tai säätää laitteita, kun kamera havaitsee tietyn tapahtuman ja kynnysarvo ylittyy. Jetson voi ohjata myös muita moottoreita sekä hallita eri laitteiden toimintoja tarpeen mukaan.
Yhdessä ZED stereokamera, Jetson-tietokone ja GPIO-liitäntä mahdollistavat reaaliaikaisen työkoneiden ohjauksen hyödyntäen stereokameran videokuvaa ja tehokasta tekoälylaskentaa.